Proyecto de automatización para una embobinadora automática en una fábrica de muebles para mascotas en Antofagasta. El objetivo fue optimizar el proceso de embobinado de materiales (como telas o cuerdas) mediante un sistema automatizado que incluye el control preciso del retorno del carro, garantizando uniformidad y eficiencia en la producción. Se implementó un PLC para gestionar la lógica de movimientos, utilizando sensores de posición, final de carrera y temporizadores para sincronizar el embobinado y el retorno del carro.
El sistema permite ajustar parámetros como velocidad, longitud de embobinado y tiempos de retorno, adaptándose a diferentes tipos de materiales y requisitos de producción.
Detalles técnicos del proyecto
Control de movimientos:
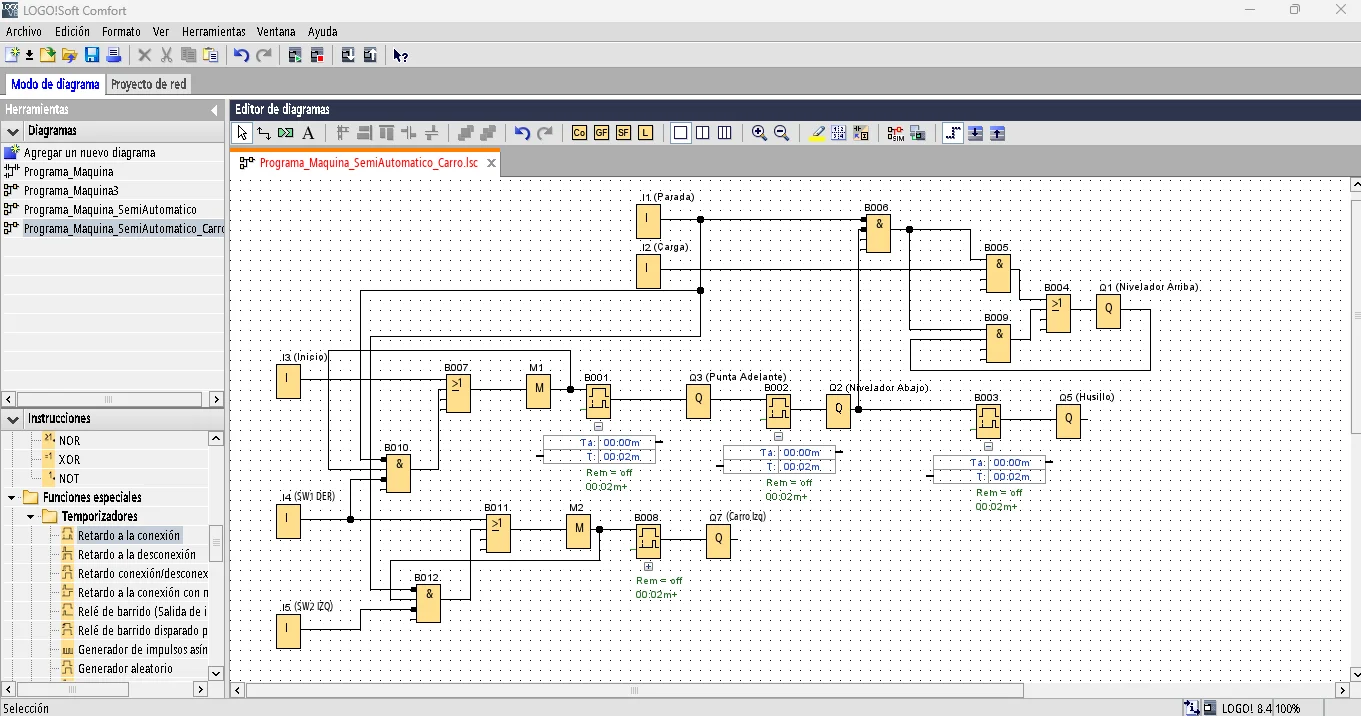
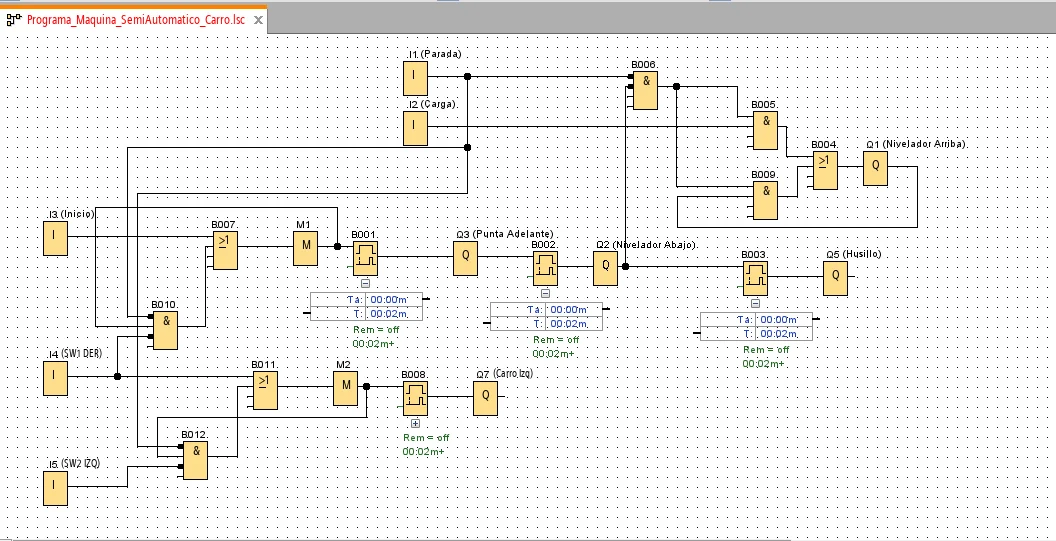
Se programó el PLC para gestionar el movimiento del carro mediante motores paso a paso, con retroalimentación de sensores de posición (I1, I2, I3, I4, I5, I6). Esto asegura que el carro se detenga en puntos precisos y retorne de manera sincronizada con el embobinado.
Lógica de automatización:
Iniciar embobinado: Al activar el pulsador de inicio (I3), el motor M1 comienza el embobinado mientras el carro (controlado por M2) avanza.
Retorno del carro: Al llegar al final de carrera (I5 o I6), el PLC activa el retorno del carro, sincronizando el movimiento con el embobinado para evitar tensiones o desalineaciones.
Parada de emergencia: Sensores de seguridad (I1, I2) detienen el sistema en caso de fallos o interferencias.
Sensores y actuadores:
Sensores de posición (I3, I4, I5, I6): Detectan el inicio, fin de carrera y puntos intermedios del recorrido.
Motores (M1, M2): M1 controla el embobinado, mientras M2 gestiona el movimiento del carro.
Cilindros neumáticos (Q1, Q2, Q3, Q5, Q6): Actúan como actuadores para movimientos secundarios, como el posicionamiento de guías o sujeción de materiales.
Interfaz de usuario:
Se desarrolló una interfaz HMI para que los operarios ajusten parámetros como velocidad, longitud de embobinado y tiempos de retorno, facilitando la adaptación a diferentes productos.
Beneficios para el cliente
Mayor eficiencia: Reducción del tiempo de producción y minimización de errores humanos.
Flexibilidad: Adaptación a diferentes materiales y diseños de muebles para mascotas.
Seguridad: Cumplimiento de normativas de seguridad industrial, con sistemas de parada de emergencia y protección de motores.
Capacitación: El personal fue entrenado para operar y realizar mantenimiento básico del sistema, asegurando su autonomía.
Aplicación en la industria
Este proyecto es un ejemplo de cómo la automatización puede transformar procesos manuales en operaciones precisas y repetibles, mejorando la calidad del producto final y reduciendo costos operativos. La embobinadora automática es clave en la fabricación de muebles para mascotas, donde la uniformidad y resistencia de los materiales son esenciales.